
part1
連桿機構是傳遞機械能的一種裝置,通常是由剛體構件用轉動副、移動副、球面副、球銷副、圓柱副或螺旋副中的一種或幾種聯結而成的機械機構,因為上述聯接副均屬於低副,連桿機構也稱為低副機構。通過不同的設計與計算,連桿機構可實現轉動、直線移動、往複運動和平面或空間的複雜函數運動軌跡。連桿機構設計包括軌跡實現、承載能力、結構設計等問題。最基本的連桿機構是平面四桿機構。
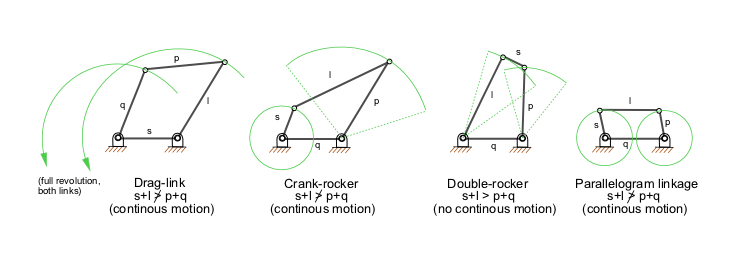
上圖是平面四連桿,所有運動副均為轉動副的四桿機構稱為鉸鏈四桿機構,它是平面四桿機構的基本形式。選定其中一個構件作為機架之後,直接與機架連結的構件稱為連架桿,不直接與機架連接的構件稱為連桿,能夠做整周迴轉的連架桿被稱作曲柄,只能在某一角度範圍內往複擺動的連架桿稱為搖桿。如果以轉動副連接的兩個構件可以做整周相對轉動,則稱之為整轉副,反之稱之為擺轉副。 鉸鏈四桿機構中,按照連架桿是否可以做整周轉動,可以將其分為三種基本形式,即曲柄搖桿機構,雙曲柄機構和雙搖桿機構。
上圖為汽缸活篩之動畫,一開始動畫先介紹活篩與連桿是如何組裝,之後介紹汽缸是如何運動,當汽油點燃引爆,空氣膨脹推動活塞,而活篩做前後運動進而推動連桿,使連桿作搖擺運動,而整體而言是一個擺轉副運動,連桿連接軸承使軸承做迴轉運動因此可以運用在機械驅動方面上。
人體關節動畫
上方網址有頭顱、上肢、下隻3D動畫。3D動畫中上肢運動,如肩膀的關節是可以360度繞圈旋轉,但手軸只能180度的平面二維運動,但不可能選轉。肩膀可以作旋轉運動,再搭配上手肘可以做移動作用,經過互相配合可以進行複合運動,但是人體關節上必盡是有方向上限制,以及轉動跟移動上的限制,無法達到機械上旋轉或移動上的自由度。經由簡短介紹希望能多少暸接機械連桿的運動方式,以及運用上。
上方網址有頭顱、上肢、下隻3D動畫。3D動畫中上肢運動,如肩膀的關節是可以360度繞圈旋轉,但手軸只能180度的平面二維運動,但不可能選轉。肩膀可以作旋轉運動,再搭配上手肘可以做移動作用,經過互相配合可以進行複合運動,但是人體關節上必盡是有方向上限制,以及轉動跟移動上的限制,無法達到機械上旋轉或移動上的自由度。經由簡短介紹希望能多少暸接機械連桿的運動方式,以及運用上。
part2
工程設計之內成功的關鍵,無不在於設計中的創新,創新設計不只需要知識和經驗,更需要具有強烈的創意,和創新的思維,想像力比知識更為重要,因為知識是有限的,創新是一切進步的根源,但是要有天馬行空的創意畢盡是很少,因此一般人大部分,先把眾人的意見、問題、所要達成的目的等等,先集結起來,在經過眾人的討論,大家提出解決的方案,最後在經過討論分析來判定是否可行性。
具有設計的一般基礎知識外,更具備豐富的創造力,進而運用創造發明的能力,產生創新的構想與設計,根據Sternberg and Lubart (1995)所提出的創造力智慧三元論:「創造力需要合成能力(synthetic ability)、分析能力(analytic ability)及實作能力(practical ability)等三種能力平衡發展」,,需要合成能力、分析能力及實作能力等三種能力平衡發展,才能有效培養創造發明能力。因此要經過合成、 分析、實作等這些能力再加上已經所學的知是才能創新。從大一到現在學了這麼多科目,做了許多實驗,我們可以把記有的知識,經過分析整合之後,在經由實作來嘗試其可行性,經過不斷的努力,才會有創新的可能,創新之後經過實踐,把所要達成目標的機件與以發明出可以運用在實體當中。
具有設計的一般基礎知識外,更具備豐富的創造力,進而運用創造發明的能力,產生創新的構想與設計,根據Sternberg and Lubart (1995)所提出的創造力智慧三元論:「創造力需要合成能力(synthetic ability)、分析能力(analytic ability)及實作能力(practical ability)等三種能力平衡發展」,,需要合成能力、分析能力及實作能力等三種能力平衡發展,才能有效培養創造發明能力。因此要經過合成、 分析、實作等這些能力再加上已經所學的知是才能創新。從大一到現在學了這麼多科目,做了許多實驗,我們可以把記有的知識,經過分析整合之後,在經由實作來嘗試其可行性,經過不斷的努力,才會有創新的可能,創新之後經過實踐,把所要達成目標的機件與以發明出可以運用在實體當中。
下面網站是台大機械教授對創新發明的看法,以及提高學生創新的方法
part3
>> M=7+10
M =
17
>> x=1:1:10
x =
1 2 3 4 5 6 7 8 9 10
>> y=x.^(1/M)
y =
Columns 1 through 8
1.0000 1.0416 1.0668 1.0850 1.0993 1.1112 1.1213 1.1301
Columns 9 through 10
1.1380 1.1450
>> plot(x,y)
M =
17
>> x=1:1:10
x =
1 2 3 4 5 6 7 8 9 10
>> y=x.^(1/M)
y =
Columns 1 through 8
1.0000 1.0416 1.0668 1.0850 1.0993 1.1112 1.1213 1.1301
Columns 9 through 10
1.1380 1.1450
>> plot(x,y)

{kind=link}
沒有留言:
張貼留言